為了確定速度,將磁輸入信號編碼處理為電脈沖序列,而且通常通過 7/14 mA 協(xié)議傳送。在最簡單的情況下,可使用比較器產(chǎn)生脈沖序列。通常會向比較器電路添加磁滯以消除低噪聲的影響。然而,這種施密特觸發(fā)器在噪聲水平較高的條件下不能確保其功能性。例如,傳感器頭和編碼器輪之間空隙出現(xiàn)顯著波動會導(dǎo)致磁輸入信號振幅發(fā)生波動。如果振幅變得很小,甚至不再超過或低于磁滯臨界值,則不管編碼器輪的位置如何,輸出信號都保持其有效工作時的最后狀態(tài)。在檢測 ABS 系統(tǒng)中的轉(zhuǎn)速時,傳感器和編碼器輪之間的距離可能會出現(xiàn)這種變化。當(dāng)存在負(fù)載變化(例如突然轉(zhuǎn)向動作),橫向作用于輪上的離心力會在輪軸上產(chǎn)生彎曲力矩。這將改變安裝在與傳感器相關(guān)的軸上的編碼器輪的位置,這些傳感器是與輪懸架相結(jié)合的。
磁位移也會影響系統(tǒng)的正常運(yùn)轉(zhuǎn)。例如,噪聲場可使實(shí)際測量信號加強(qiáng)或減弱,致使施密特觸發(fā)器的臨界值被高估或低估。然而,位移不僅是由外部場引起的。被動輪極高的速度可使輪中產(chǎn)生渦流,而這又會產(chǎn)生磁噪聲場。所產(chǎn)生的位移會影響操作的可靠性。
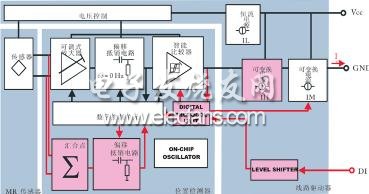
為消除此噪聲對輸出信號的影響,另一封裝中裝入了信號處理專用集成電路(ASIC)。后者也包含一個線路驅(qū)動器,以便為信號處理和高電壓接口提供電源電壓(圖 1)。圖 4 所示為信號處理架構(gòu)。用于故障排除的中心元件為包括調(diào)式放大器、偏移抵消電路和智能比較器。根據(jù)傳感器和編碼器輪之間的距離,可調(diào)式放大器可以與信號級匹配。對于偏移抵消電路,有一種控制系統(tǒng)(與高通濾波器不同)可消除偏移,同時將系統(tǒng)頻率保持為 0?Hz。否則,就不可能檢測到停止不動的編碼器輪。智能比較器的臨界值是可變的,并且可設(shè)置,使磁滯處于信號振幅的 20% 和 45% 之間。這可確保充分抑制噪聲,而且振幅突降達(dá) 50% 也不會影響系統(tǒng)的正常運(yùn)轉(zhuǎn)。模擬前端的個別組件控制則通過數(shù)字接口實(shí)現(xiàn)。所述系統(tǒng)均利用仿真技術(shù)開發(fā)和驗(yàn)證。下文將概略介紹系統(tǒng)開發(fā),同時闡述如何使用模型來改進(jìn)設(shè)計。
?
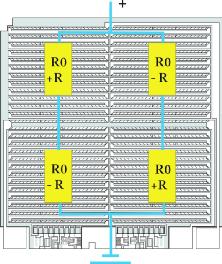
圖 3 裸片上的 AMR 元件配置
?
圖 4 現(xiàn)代速度傳感器的信號處理原理
?
圖 5 網(wǎng)格 — 磁場有限元模擬的起點(diǎn)