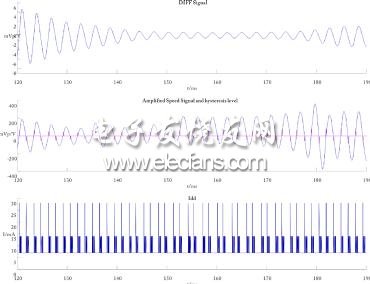
通過此項建模,可以分析與輸入信號呈函數關系的系統行為。圖 9 中的第一張圖表顯示通過改變傳感器和編碼器輪之間的距離而產生的磁輸入信號。此信號是有限元件仿真結果,之后 AMR 效應可將此信號轉化成傳感器橋的電輸出信號。中間的圖表是模擬信號處理的結果。下面一張圖表顯示輸出信號。此器件使用 A 7/14/28 mA 協議。這種協議可用來傳送額外信息,例如感測旋轉或氣隙長度。除了這些結果之外,也可以檢查數字控制的運行情況。圖 10 顯示的是 ModelSim 中的信號圖象實例。
通過MATLAB 進行仿真控制并結合其他仿真器可創造更多選擇。首先,例如可使模擬自動化。然后可以使用大量算法在 MATLAB 中進行信號仿真。例如,對所需系統和信號參數進行蒙特卡羅 (Monte Carlo) 仿真,隨后進行自動化分析。通過 FEM 仿真器(例如 NASYS),可以擴展所仿真的系統組件,甚至包括 MR 傳感器頭和相關編碼器,從而將系統視圖擴展到傳感器周圍直接相關的區域。圖 11 顯示的是用于此目的的整個工具鏈。
?
圖 9 模擬結果:電輸出信號比對磁輸入信號

?
圖 10 數字系統元件的仿真

?
圖 11 完整的仿真鏈
總結
使用磁場仿真器來確定磁輸入信號,同時Simulink對模擬輸入進行仿真。HDL設計之后對模擬部件進行數字控制仿真。最終整個系統實現全面仿真。建模已成為預開發的一部分,并隨著產品開發的進程不斷優化改進。最后就會得到經過驗證確認符合產品規范的設計,以及可用來解決后續問題的模型,作為市場支持的一部分。